Our design challenge was to develop a solution or system of solutions that alleviates the usability concerns seen by those aged 65+, specifically when loading and unloading their personal vehicle. While this project aims to mitigate the concerns of our target demographic, the solution must also be usable, and useful, to anyone else and must maintain an appeal towards the general population. The solution is also derived with the consideration that it would be implemented in 20 years, which provides an opportunity to utilize future technologies in our design. We won best project in our category.
Our project goal was to design a concept car which is to be produced 20 years in the future. Thus, we had to incorporate changing technology into our car. This included:
1. Increasing popularity of crossover vehicles as they provide more room for the passenger and cargo.
2. An increased prevalence of electric vehicles as people opt for greener vehicles and carbon emissions laws becoming increasingly strict.
2. Increased use of self driving vehicles as the technology develops and becomes safer to use.
To understand our target customer, we performed ethnographic studies, including interviews, surveys and observations. This gave us an insight the problems our customers faced and more importantly their lives. They had three main problems:
1. Reduced range of motion preventing them from reaching certain parts of the vehicle.
2. Enclosure of the cars were obtrusive meaning they had to move around more.
3. The space in the car wasn't being utilized efficiently.
This served as a base for our design objectives and our design specifications.
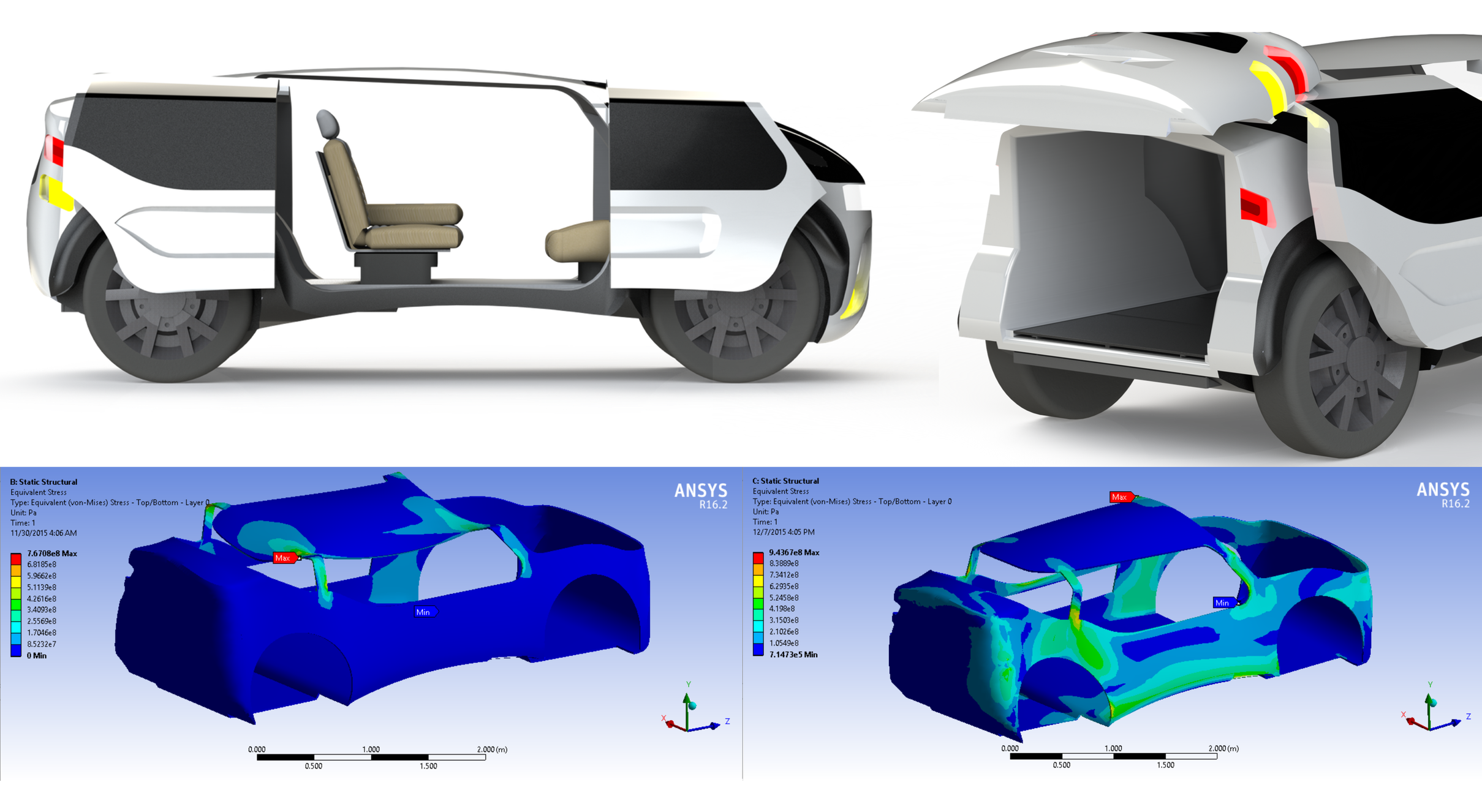
To solve the obtrusive closures problem, we developed a mechanism to allow enclosures to open without extending too far from the body of the car. A video of the enclosure is in the next slide.
Additionally, we removed the B-pillar allowing for easier access to the car. This required a change in material to carbon fiber. A simple FEA was run to show the performance in a side impact and rollover situation. Although this FEA failed, a further refinement of the fiber layup would allow the car to pass these tests.
In our research, we realized people weren't using their trunk effectively. This inspired us to create a configurable interior to maximize the space in the cabin if the trunk is not being used to store items. This was possible due to the self-driving nature of this car. The seats move on a rack and pinion rail embedded in the floor of the car.
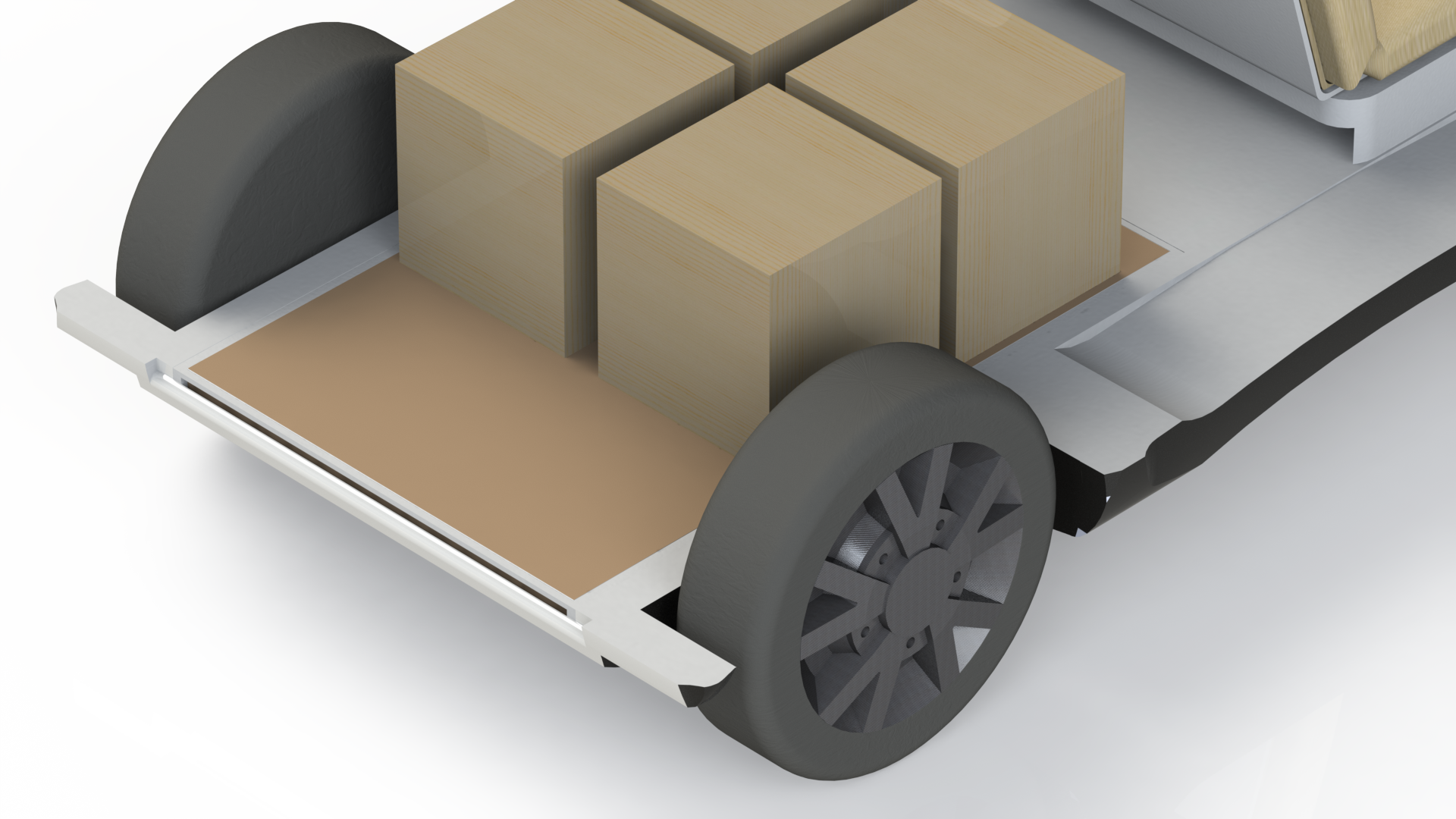
Due to the reduced range of motion, the elderly couldn't easily reach the back of the trunk. Hence, we implemented a conveyer belt system in the trunk allowing the user to place their items at the edge and they are automatically moved further forward.
Once we had finished our design, we conducted surveys to determine what people though about our design, and if they would use it. From our survey, we noticed that people generally accpeted our design. The most popular feature was self driving, while the least popular was hand print recognition.
For commuters who want a convenient way to get around and transport belongings, our 20 year concept vehicle reduces the physical effort of loading and unloading cargo, provides convenient and fast modes of entry, and features a dynamic interior.
Unlike existing modes of transportation, our design system has assistive technologies that allow for easy-to-use modes of entry, easier placement/removal of cargo, protection of stored items, and adequate room for storage, all seamlessly integrated in a self-driving vehicle.
This is because the integration of innovative systems such as dynamic ooring assists in loading and unloading of cargo, adjustable interior spaces allow for versatile storage, and unobtrusive enclosures with tap and go entry provide a less exhaustive experience that supports a more active, independent lifestyle for all.
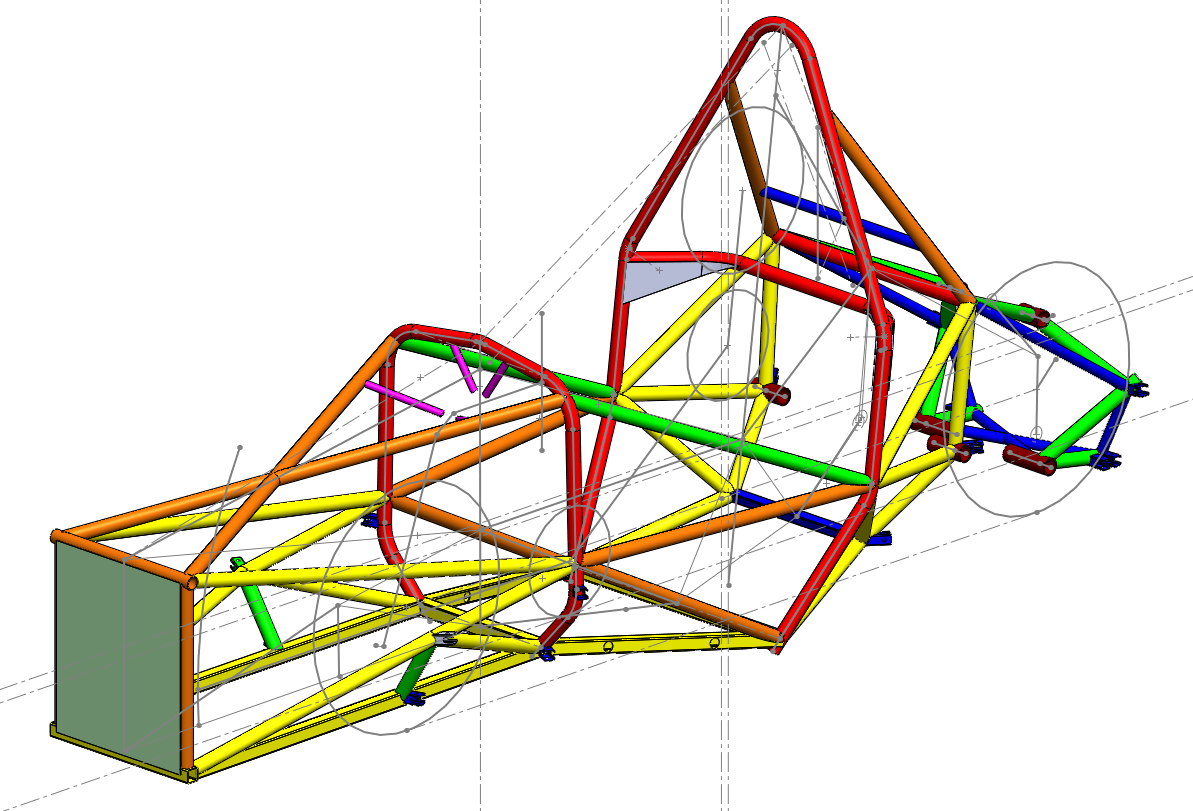
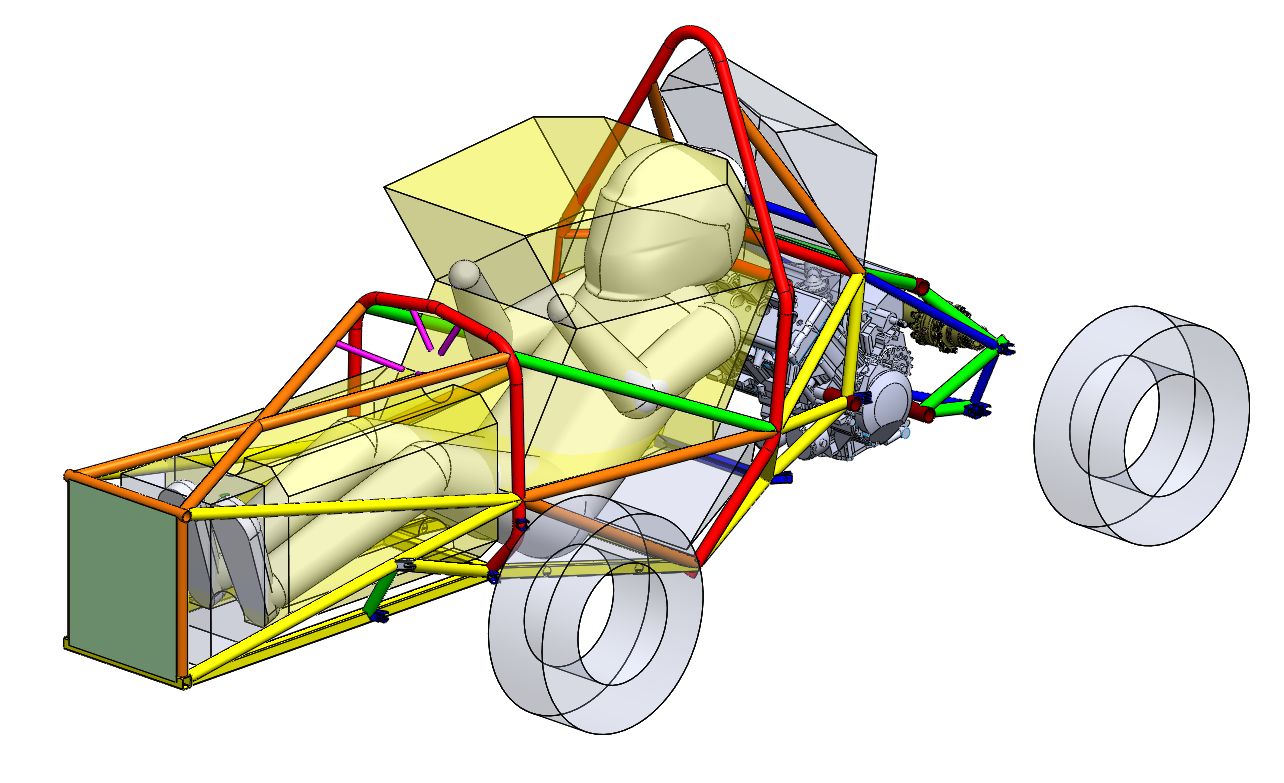
The primary function of the chassis is to connect all four wheels of the race car and provide mounting locations for all components on the car.
An effective chassis will protect the driver in case of a collision and absorb all suspension, powertrain, aerodynamic loads without deflecting excessively.
I successfully decreased the weight of the chassis by 18% and increased the torsional stiffness by 32%
These are the specifications used when developing the chassis.
1. Protect the driver in case of collision and comfortably accommodate the driver.
a) This will be satisfied by adhering to the rules provided by FSAE and integrating metrics from the ergonomics jig.
2. Be sufficiently stiff to effectively control lateral load transfer distribution.
a) This will be satisfied by meeting the torsional stiffness goal of 2175 lb.ft/deg
3. Be sufficiently strong to not deflect excessively or fail under loads
a) For suspension loads, deflection in excess of 0.1" can negatively affect drive kinematics hence the goal is to stay under this target.
b) For other loads, a factor of safety of at-least 1.25 will be employed.
4. Provide mounting locations for all components while balancing weight distribution
a) Keep the static weight transfer at 50:50 for best distribution of loading on all wheels, hence maximum grip.
5. Keep center of gravity as low as possible
a) Keep center of gravity under 13" to minimize load transfer
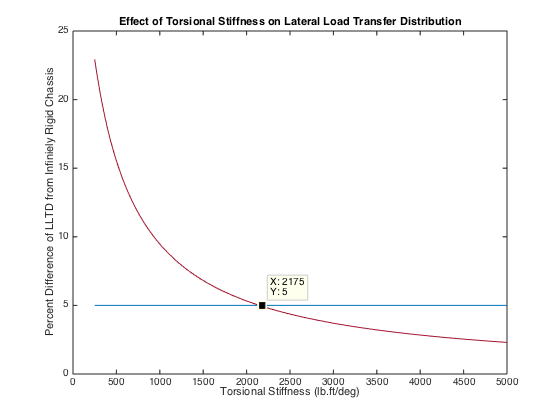
One important specification for the chassis design is that it affects lateral load transfer distribution (LLTD). LLTD is used to control the understeer and oversteer characteristics of the car, which is used to tune the handling. Thus it is important that the chassis is sufficiently stiff.
This model looks at how torsional stiffness affects LLTD when compared to an infinitely rigid chassis. This model considers roll stiffness, roll center heights, center of gravity height, mass, track width and wheel base. The target torsional stiffness of 2175 lb.ft/deg was determined when the LLTD was within 5% of the infinitely rigid case.
For optimal cornering performance, it was decided that our car would have a 50:50 front to back weight distribution. To ensure we meet this goal, I created envelopes for the major components of the car and assigned approximate weights to these. In addition to balancing the weight, these envelopes allowed for more efficient packaging, reducing the overall size of the chassis, hence reducing weight.
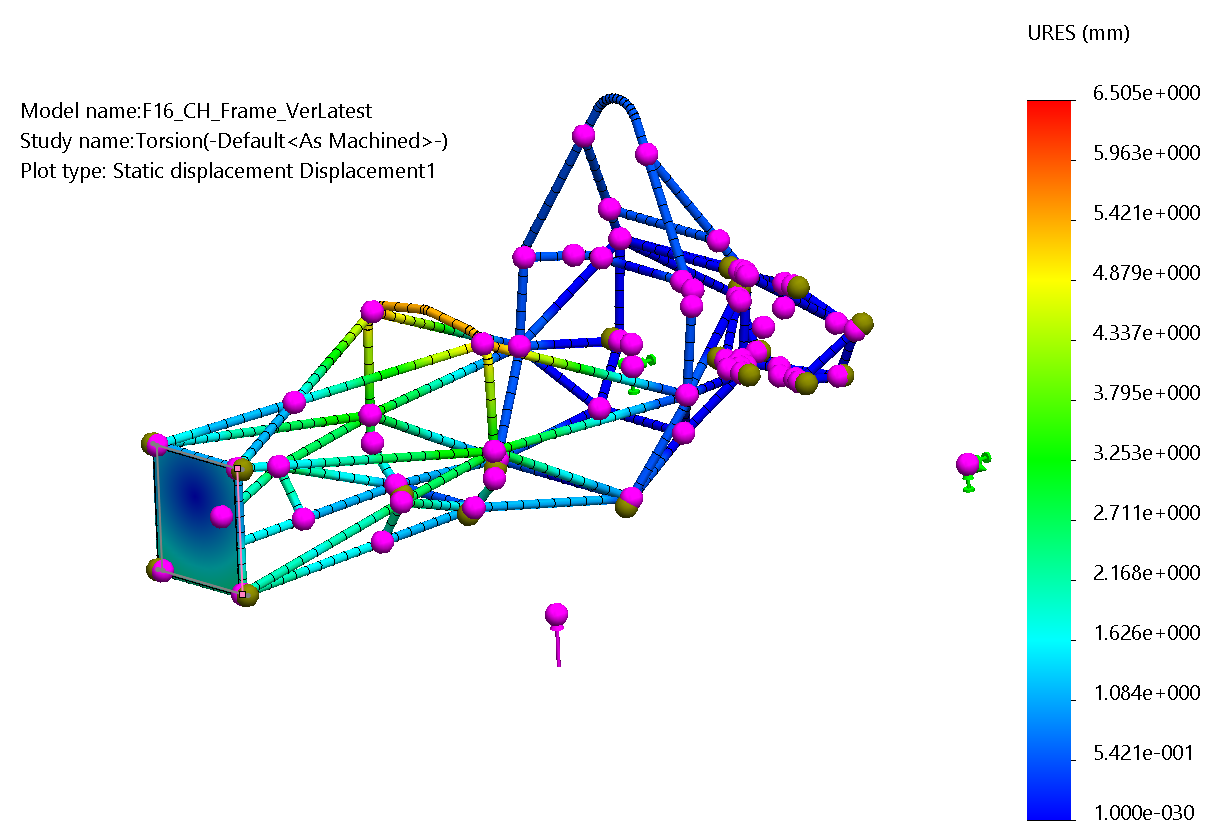
To ensure torsional stiffness target is met, FEA analysis was used to measure the torsional stiffness of the chassis. Using this, I was able to balance the tradeoff between weight and torsional stiffness.
To run the test. A moment is applied at the front axel and the rear axel is fixed. The angle deflection is measured to provide the torsional stiffness value.
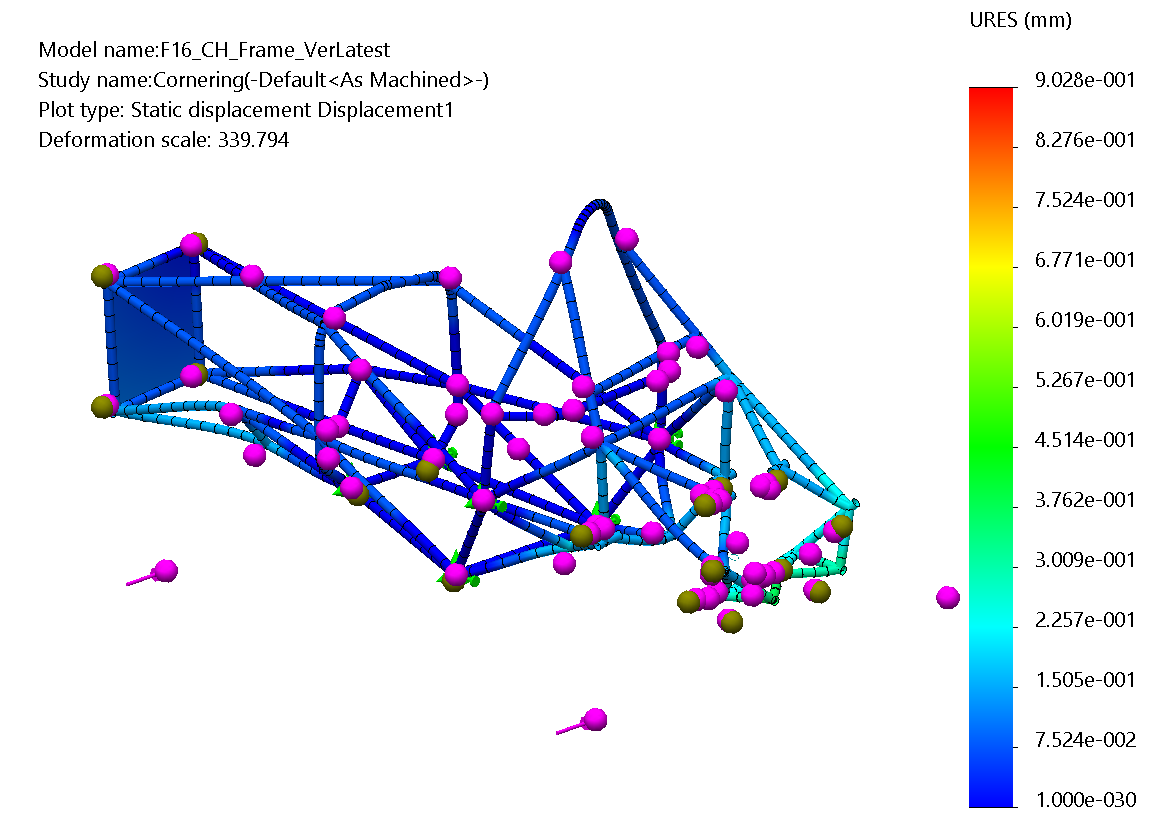
It is important the chassis doesn't fail under loads. Hence, FEA's were utilized to test loads from Suspension, Engine and Aerodynamic Devices.
On the right is a cornering test where the car is in a 2G turn and the inside wheels have lifted of the ground. The FEA showed that the chassis met the required specifications in the worst case condition.
This project led to the development of an autonomous tennis ball collector. This robot automatically detects tennis ball within a certain box, moves to the ball and proceeds collect it.
This robot consisted of the mechanical system which includes the frame, ball collecting mechanism and the drivetrain, the electrical system which included the motors, Arduino and a power distribution system and a computer vision system which utilizes OpenCV to achieve these tasks.
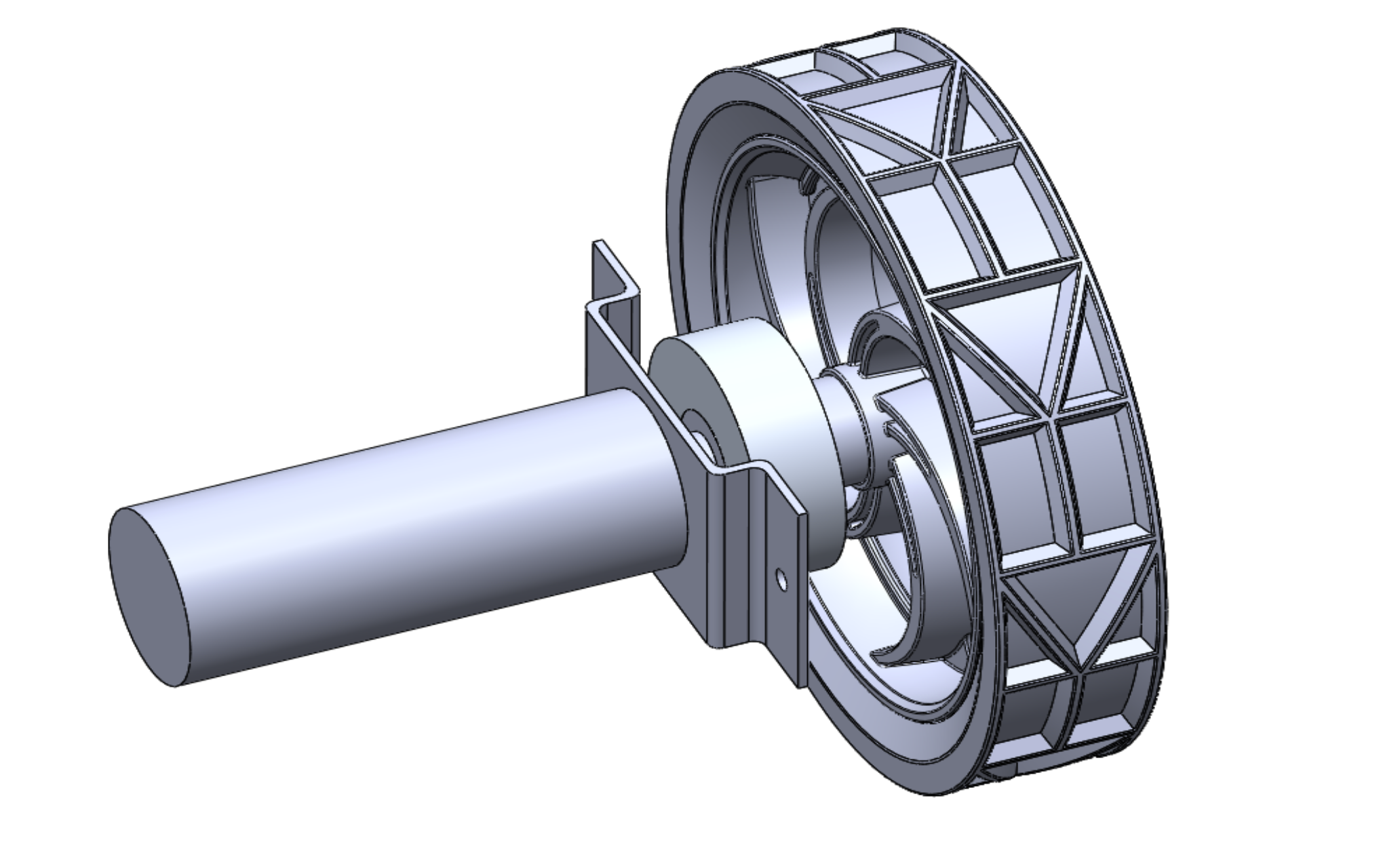
The robot uses rotating baffels with scoops to capture the balls. The balls are then guided up a ramp and into the collecting basket near the back of the robot. This mechanism is powered using a DC motor and has a 98% success rate.
Two high traction wheels in the front are used to drive the robot. These are connected to a coupling mechanism which is attached to the DC motor. They are held in place using a bracket and the load is transferred to the frame through bearings. There are caster wheels in the back to allow the robot to move freely.
The goal of this project was to create a wearable device used to communicate between people. This project implements a glove that picks up skydiving signals using touch and accelerometer sensors and transmits them to the other person's glove where it is viewable on an LED array. This allows for communication is bad weather situations, or simply for practicing. This project utilized Arduino for prototyping.
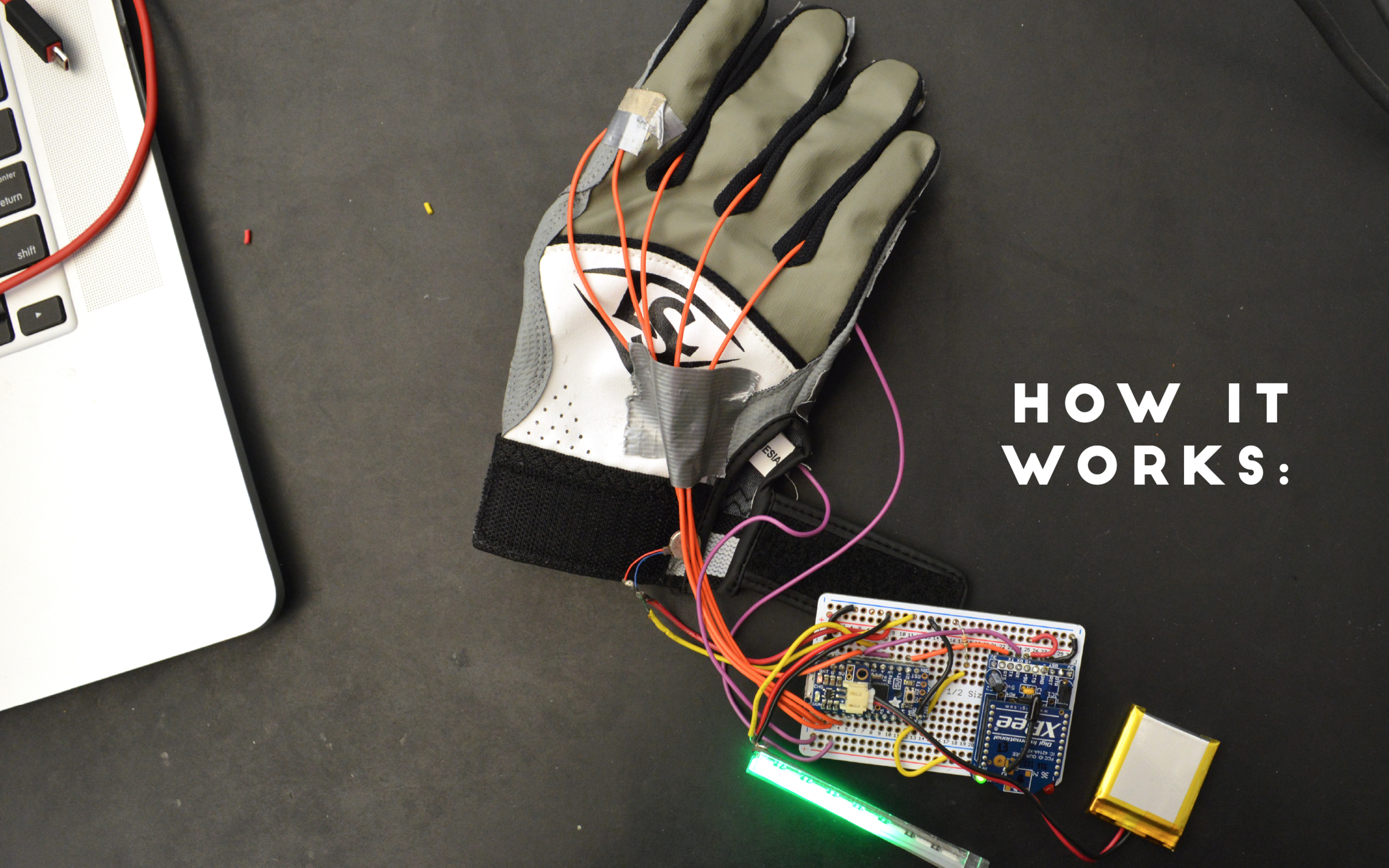
The glove utilizes an Arduino board to process signal from sensors and send outgoing signals.
Conductive fabric connected to open ground and power was used to create simple switches which detected if the finger was open or closed. An accelerometer detected the orientation of the hand.
This data was processed by the Arduino and communicated to the other glove using a XBee, where it would display the signal on a LED array.
This technology has many potential application. Adding more sensors and make it a comprehensive hand signal detection glove. It can be used by military jumpers who want to communicate in bad weather or by new skydivers who want to practice their signs.
If enough sensors are added, there is even a potential to use the technology for detecting sign language and covering it into text.
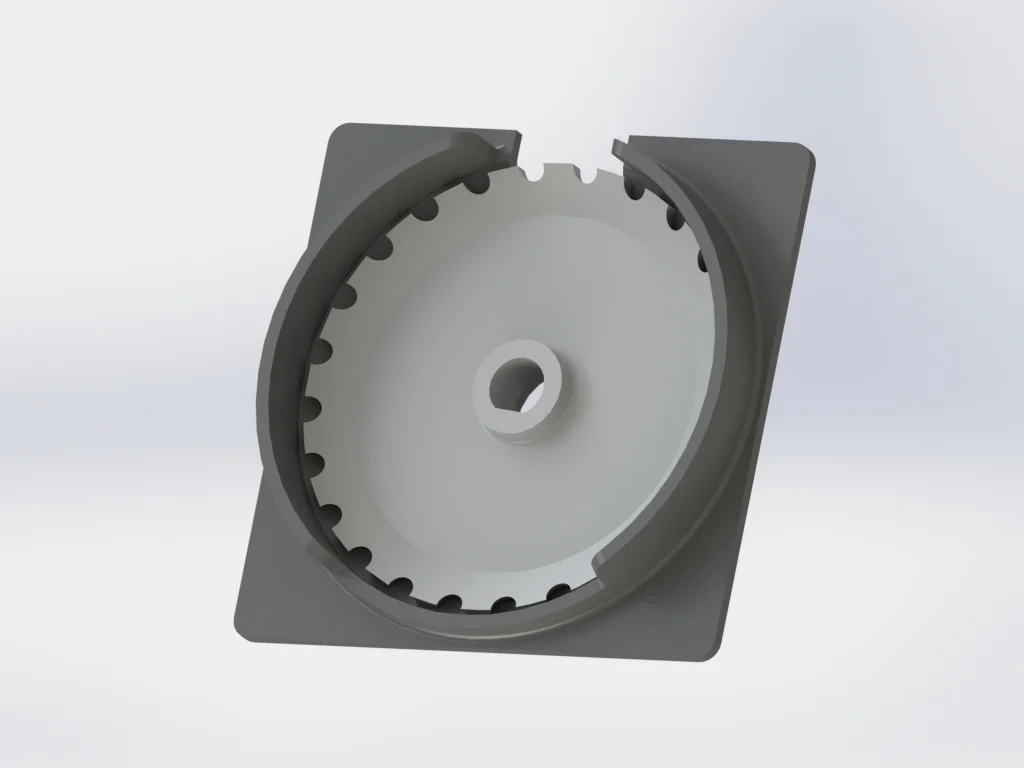
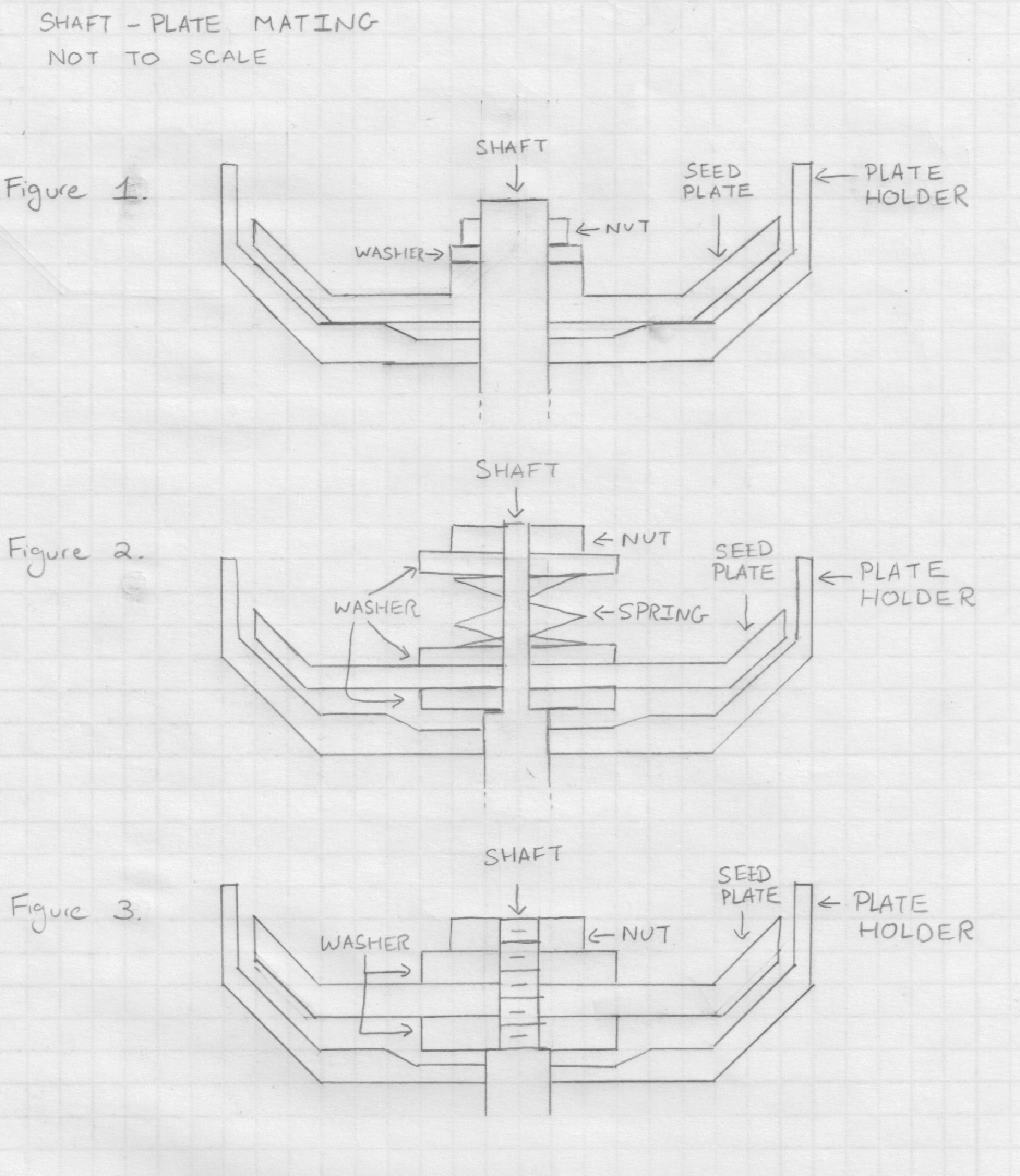
This is the final iteration of a seed metering system design used by farmers in Bangladesh. In the original design, the teeth were inadequately designed to grab and hold onto the seed. Also, the plate rubbed against the holder causing too much friction, and eroded the key. This project solved the operating problems by changing the design and making the part from plastic instead of metal to simplify the manufacturing process.
The metering plate is spun in the holder through a shaft. Figure 1 show the plate is originally connected to the shaft through a key. However, the key hole is eroding as the plate is made from plastic and the rotating plate was rubbing against the stationary holder. Figure 2 and 3 are the alternate methods that are under consideration. Figure 2 utilizes a spring to compress the plate onto the shaft and Figure 3 utilizes a nut and a threaded shaft to compress the plate onto the shaft. Both design remove contact between the plate and holder, however the gap has to be minimized as corn can get stuck between the plate and holder. We are currently testing alternative design to determine the best method of spinning the plate.
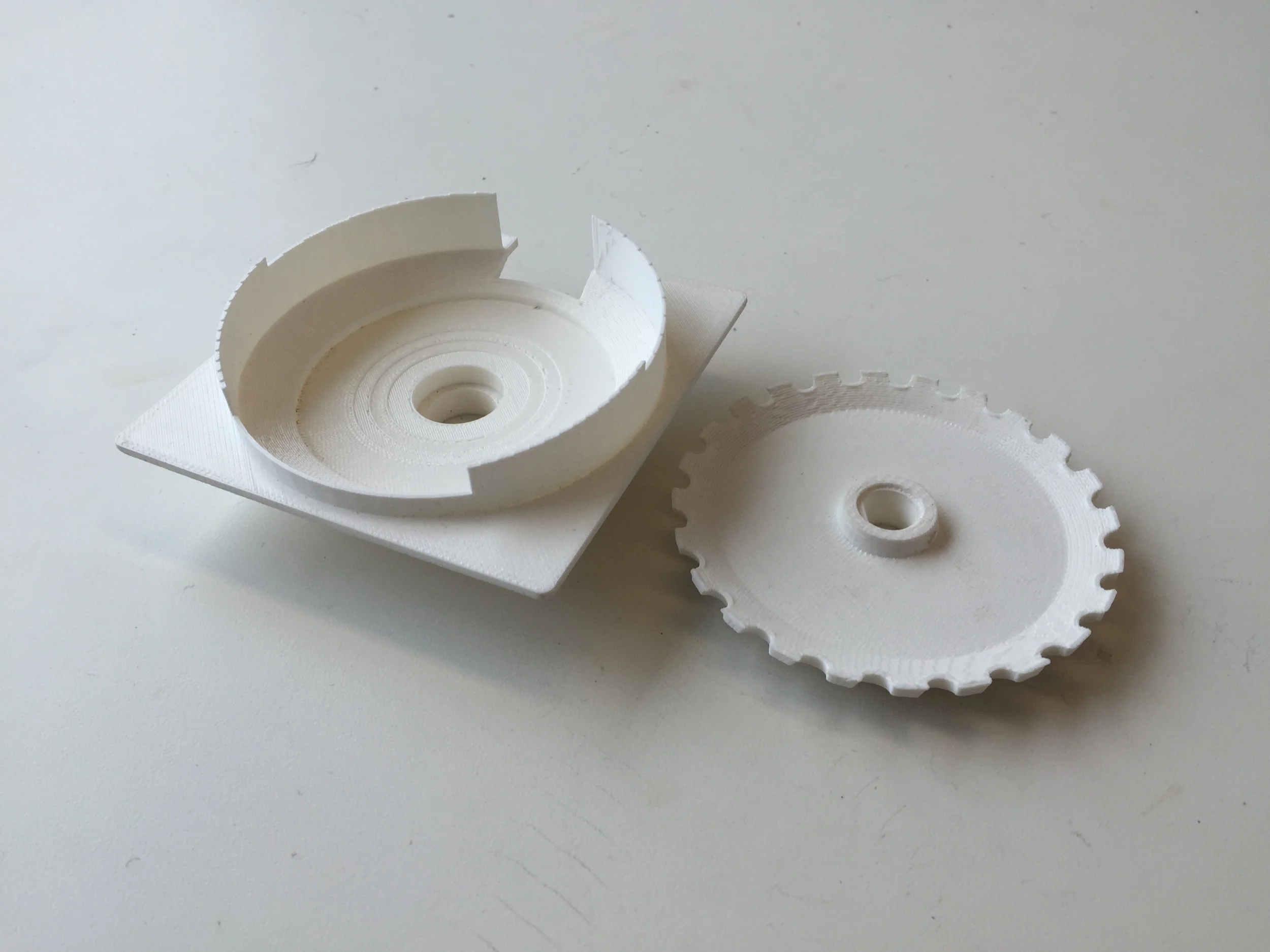
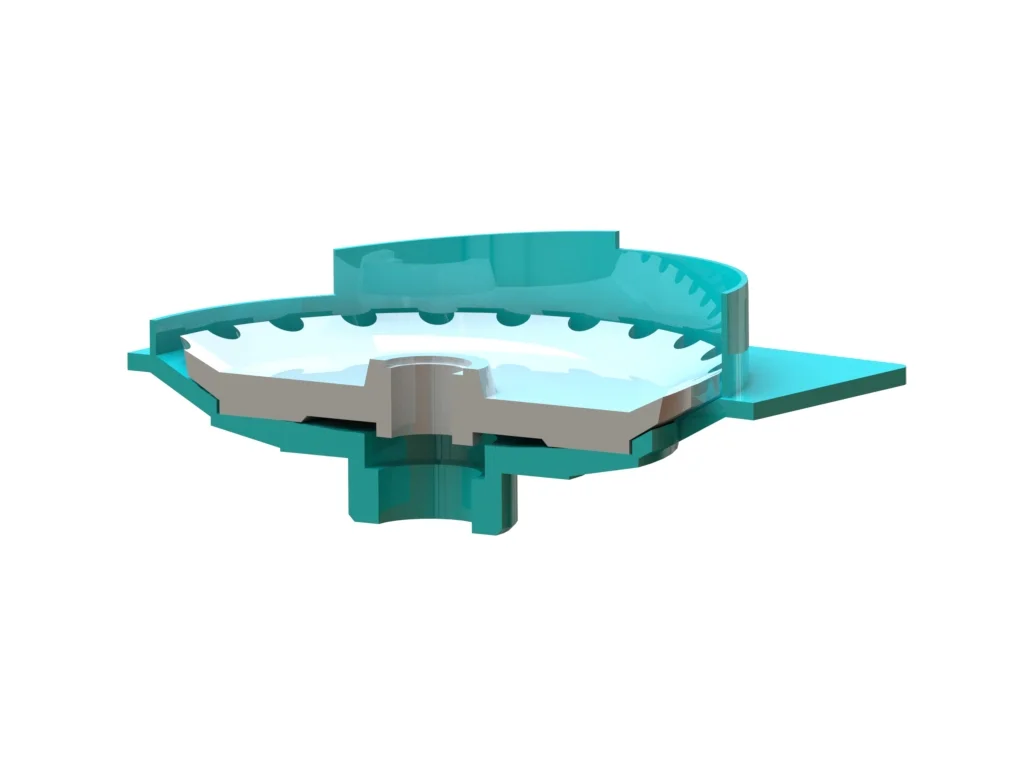
3D Printing was used to create prototypes of the models to test. This allowed for rapid testing of new designs and determining which teeth design worked the most effectively.